 Kevin et Philippe se sont lancés dans ce projet : Un drone piloté par un Raspberry Pi 2 et équipé d’une carte contrôleur Navio+. Ce sont deux anciens membres du club de WissousModelisme de 2006 à 2011, et ils mettent toutes leurs compétences et leur passion des modèles volants dans ce projet.
Kevin et Philippe se sont lancés dans ce projet : Un drone piloté par un Raspberry Pi 2 et équipé d’une carte contrôleur Navio+. Ce sont deux anciens membres du club de WissousModelisme de 2006 à 2011, et ils mettent toutes leurs compétences et leur passion des modèles volants dans ce projet.
Tout est publié, tout est partagé !
myPiDrone un drone quadricopter à base de Raspberry Pi
Le matériel



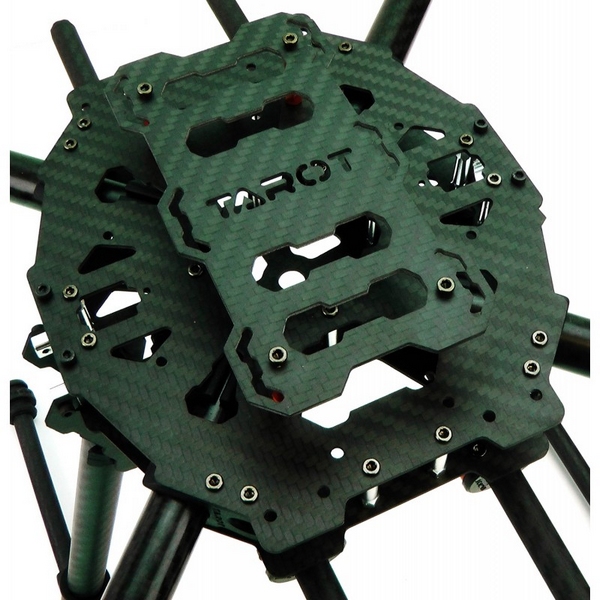
Tarot 650 : Un châssis en fibre de carbone entièrement repliable
Raspberry PI 2 : Est-il encore besoin de présenter la framboise ?
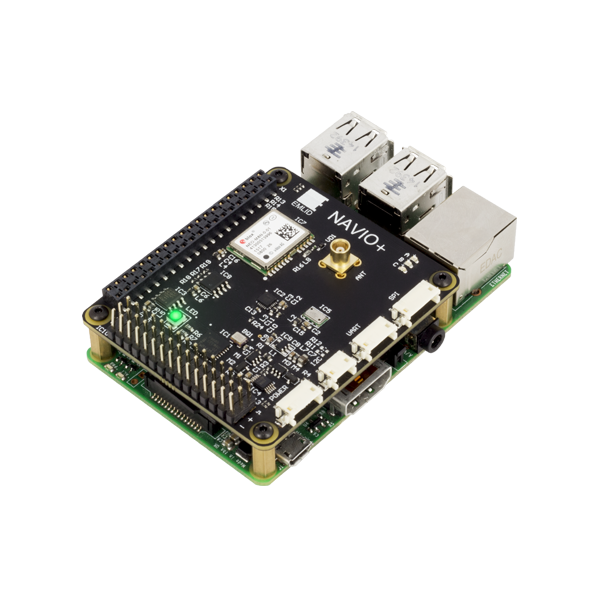
NAVIO+ : Navio + est une version améliorée du shield pilote automatique Navio conçu pour le Raspberry Pi A +/B +. Cette carte HAT remplace plusieurs contrôleurs embarqués facilitant le développement et améliorant la robustesse de vos projets. Navio+ étend la connectivité du RasPi et permet le contrôle du déplacement de tous types de robots : voitures, bateaux, avions, multirotors. Navio+ est équipé d’un récepteur GPS MIO et/Glonass/Beidou.
* Raspberry Pi non inclus
AMÉLIORATIONS
Navio + est équipé d’un module M8N (GPS/Glonass/Beidou) permettant de connaître avec exactitude la position du drone.

TARANIS X9D : Le Taranis X9D de FR-SKY est un émetteur 16 voies 2.4Ghz avec télémétrie intégrée. Son firmware est open source, c’est dire que vous pouvez pouvez le télécharger et le modifier (à vos rsiques et périls  ). Vous le trouverez sur le site du fabricant : http://www.frsky-rc.com . Le logiciel OpentTX companion compatible Windows, Mac, Linux vous permet d’éditer, de sauvegarder et de partager vos modèles, ainsi que de simuler les configurations de votre modèle. Pour en savoir plus, rendez-vous sur : OpenTX
). Vous le trouverez sur le site du fabricant : http://www.frsky-rc.com . Le logiciel OpentTX companion compatible Windows, Mac, Linux vous permet d’éditer, de sauvegarder et de partager vos modèles, ainsi que de simuler les configurations de votre modèle. Pour en savoir plus, rendez-vous sur : OpenTX
A ce matériel, pour obtenir myPiDrone, il faut ajouter l’imagination et l’ingéniosité de Kev&Phil 
Combien ça coûte ?
- Tarot Iron Man 650 pliable 3 K Fiber de carbone Quad Copter cadre TL65B01 ~$90
- TURNIGY Plush 30amp Speed Controller ~$15 X 4
- Turnigy Multistar 3525-850Kv 14Pole Multi-Rotor Outrunner ~32$ X 4
- Multistar High Capacity 3S 5200mAh Multi-Rotor Lipo Pack ~30$
- Hobbyking Slowfly Propeller 10×4.5 Blue 4pcs + orange $5 X 2
- FrSky 2.4GHz ACCST TARANIS X9D PLUS and X8R Combo Digital Telemetry Radio System (Mode 2) ~$300
- FrSky SBUS to CPPM Converter/ SBUS to CPPM Decoder ~$20
- APM MavLink to FrSky SmartPort Converter ~$26
- Turnigy™ TSS-10HM DS Micro Servo 2.2kg / 0.12sec / 10g X 3 (camera gimbal)
- Raspberry Pi 2 Type B ~$40
- Raspberry Pi Module Caméra 5MP ~$20
- TP-Link TL-WN722N ~$8 X 4
- NAVIO+ = Navio+ board + Wire pack + GPS/GNSS antenna + Power module ~$167
Ces prix relevés lors de la conception de myPiDrone peuvent bien entendu différer aujourd’hui. Ils suivent le cours du $ et peuvent différer selon le fournisseur.
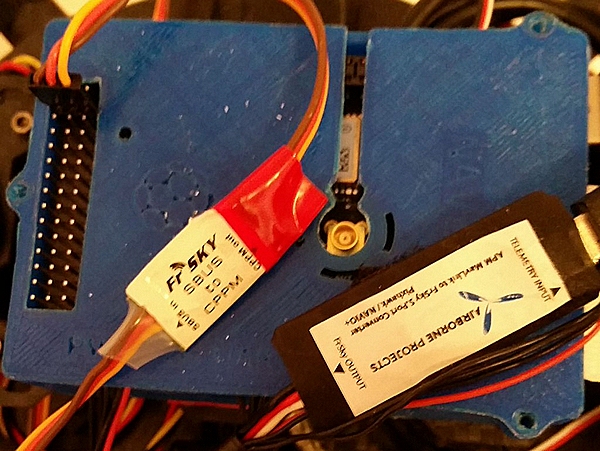
Connectique globale :

Cliquer pour agrandir
Connexion SBUS X8R vers NAVIO+ port CPPM et convertisseur télémétrie MAVLink/FfSky
Connectique ESC / Moteurs
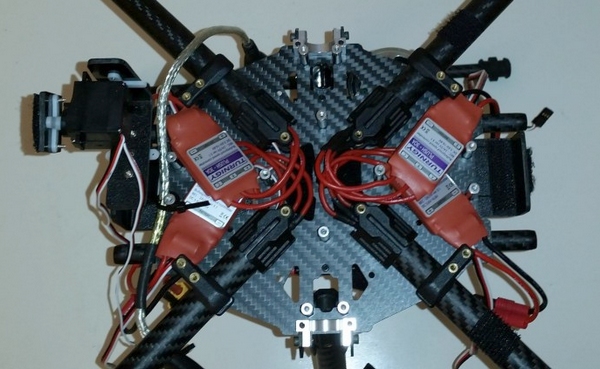
Cliquer pour agrandir
Logiciels embarqués
- ArduCopter envoi sur la radio 3DR via le port série NAVIO+ /dev/ttyAMA0 à 57600 baud (à configure avec apmplanner2 dans la listes des paramètres SERIAL0 BAUDRATE = 57 à la place 115)
- ArduCopter envoi sur udp:127.0.0.1:14550 vers mavproxy.
- MAVProxy renvoi ensuite vers le convertisseur MAVLink/FrSky connecté sur le port USB /dev/ttyUSB0 à 57600 baud et controle le RPI2 à l’aide du module MyPiModule (voir chapitre suivant)
- La video capturée par raspivid est envoyée à tx pour une transmission en wifibroadcast. Pré-requis Mise en oeuvre du Wifibroadcast pour la Vidéo
Montage de la caméra
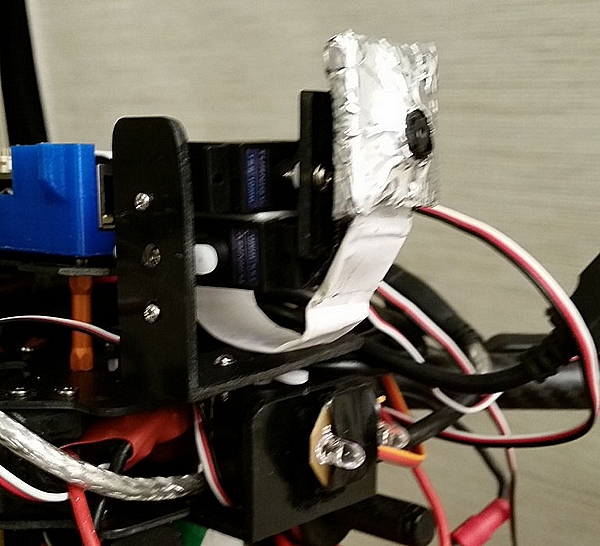 La caméra charger de retransmettre la vidéo au sol est stabilisée par 3 servos.
La caméra charger de retransmettre la vidéo au sol est stabilisée par 3 servos.
Et ça donne ça !
Photos
Quelques photos de cette superbe réalisation. Vous pouvez cliquer dessus pour les agrandir…






Vidéo
Conclusion
Une belle réalisation mettant en œuvre le Raspberry Pi. De plus tout est publié et partagé, ce qui met à disposition de la communauté Raspberry Pi la totalité des scripts réalisés et utilisés par Kev&Phil ! Il suffit de vous rendre sur la page github du projet myPiDrone et sur la page du site myPiDrone (en Français et en Anglais) pour vous en rendre compte.
J’ai demandé à Kévin à qui était destinée cette réalisation. Sa réponse : « Je dirais que cette réalisation s’adresse à des personnes surtout familières avec Linux avant le stade d’expert, et avec quelques notions d’électronique. En suivant nos différents articles, il est quand même possible à une personne n’ayant pas les connaissances de réaliser ce projet, nous sommes aussi ouvert à toutes questions pour aider ces personnes.«
Si vous vous lancez dans cette réalisation, n’hésitez pas à laisser commentaires et photos en bas ce cette page
Sources
- http://mypidrone.com/
- https://github.com/MyPiDrone
- https://github.com/MyPiDrone/MyPiModule/blob/master/mavproxy_MyPiModule.py